Laporan Akhir Modul 4
Pendeteksi Suhu Tubuh dan Penyemprotan Handsanitizier Otomatis
Saat alat mendeteksi suhu tubuh normal,alat otomatis akan memberikan handsanitizier,sedangkan jika suhu tidak normal alat akan membunyikan buzzer.
a. Mengetahui orang yang sedang sakit atau terkena covid19 ketika akan mencuci tangan
b. Membersihkan tangan dengan handsinitizier otomatis.
- Arduino


 |
| Gambar 9. Baterai |
1. Arduino
 |
| Gambar 11. Arduino |
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
Microcontroller ATmega328P |
Operating Voltage 5 V |
Input Voltage (recommended) 7 – 12 V |
Input Voltage (limit) 6 – 20 V |
Digital I/O Pins 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins 6 |
Analog Input Pins 6 |
DC Current per I/O Pin 20 mA |
DC Current for 3.3V Pin 50 mA |
Flash Memory 32 KB of which 0.5 KB used by bootloader |
SRAM 2 KB |
EEPROM 1 KB |
Clock Speed 16 MHz |
Bagian-bagian Arduino UNO :
Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
Power Jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
2. Sensor Ultrasonik
 |
| Gambar 12. Sensor Ultra Sonik |
Sensor Ultrasonik adalah modul elektronik yang mendeteksi sebuah objek menggunakan suara.Sensor ultrasonic terdiri dari sebuah transmitter (Pemancar) dan sebuah receiver (penerima). Transmitter berfungsi untuk memancarkan sebuah gelombang suara kearah depan. Jika ada sebuah objek didepan transmitter maka sinyal tersebut akan memantul kembali ke Receiver.
Fungsi sensor ultrasonic adalah mendeteksi benda atau objek di hadapan sensor. Penerapannya banyak dipakai pada robot pemadam api dan robot obstacle lainnya. Salah satu sensor yang paling sering digunakan adalah sensor ultrasonic tipe HC SR04.
3. Sensor Infrared
 |
| Gambar 13. Sensoro Infra Red |
Sensor IR (Infrared) adalah sebuah sensor yang dapat mendeteksi rintangan menggunakan cahaya inframerah yang dipantulkan.Sensor ini mempunyai dua bagian utama yaitu IR emitter dan IR receiver. Emitter bertugas memantulkan inframerah ke rintangan atau objek kemudian akan dipantulkan dan diterima oleh receiver. Ketika inframerah mengenai sebuah objek, kondisinya akan LOW dan begitu juga sebaliknya.
Dalam komponen tersebut terdapat 2 sensor infrared yang masing-masing berfungsi sebagai pemancar dan penerima, bentuknya seperti LED kecil, dari gambar diatas dapat dilihat Infrared yang berwarna biru berfungsi sebagai pemancar cahaya, dan yang berwarna hitam berfungsi sebagai penerima cahayanya
4. Sensor LM35
 |
| Gambar 14. Sensor LM35 |
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC pada suhu 25 ºC
Karakteristik Sensor LM35.
1. Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC seperti terlihat pada gambar 2.2.
3. Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
4. Bekerja pada tegangan 4 sampai 30 volt.
5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
5. Inter Integrated Circuit (I2C)
Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arah menggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.
Cara Kerja Komunikasi I2C :
 |
| Gambar 15. Skema I2C |
Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop.
Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.
Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL.
R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave)
ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
6. Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkanpotensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka kontrol input akan mengirim sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi yang diinginkan.
Untuk lebih jelasnya mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain sebagainya.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain sebagainya. Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180° dan servo rotation continuous.
- Motor servo standard (servo rotation 180°) adalah jenis yang paling umum dari
motor servo, dimana putaran poros outputnya terbatas hanya 90° kearah kanan dan
90° kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau
180°.
- Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya
sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan
atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
Prinsip Kerja :
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse
Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang
diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai
contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo
ke posisi sudut 90°. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah
posisi 0° atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang
diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi
180° atau ke kanan (searah jarum jam).
7. LCD Display
 |
| Gambar 16. LCD 16x2 |
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar.
Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.
8. LED
 |
| Gambar 17. LED |
LED adalah suatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.
9. Potensiometer
 |
| Gambar 18. Potensiometer |
Potensiometer (POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya.
Prinsip Kerja (Cara Kerja) Potensiometer :
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon).
Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
10. Resistor
 |
| Gambar 19. Resistor |
Resistor merupakan salah satu komponen yang paling sering ditemukan dalam Rangkaian Elektronika. Hampir setiap peralatan Elektronika menggunakannya. Pada dasarnya Resistor adalah komponen Elektronika Pasif yang memiliki nilai resistansi atau hambatan tertentu yang berfungsi untuk membatasi dan mengatur arus listrik dalam suatu rangkaian Elektronika. Resistor atau dalam bahasa Indonesia sering disebut dengan Hambatan atau Tahanan dan biasanya disingkat dengan Huruf “R”. Satuan Hambatan atau Resistansi Resistor adalah OHM (Ω). Sebutan “OHM” ini diambil dari nama penemunya yaitu Georg Simon Ohm yang juga merupakan seorang Fisikawan Jerman.
11. Baterai
|
| Gambar 20. Baterai |
Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone, Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use) dan Baterai yang dapat di isi ulang (Rechargeable).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
// Master
#include <LiquidCrystal.h>
LiquidCrystal lcd(12,11,5,4,3,2);
const int pinTrigger = 7;
const int pinEcho = 6;
float durasi, jarak, nilai;
const int s1 = 8; //dalam ruangan
const int s2 = 9; //diluar ruangan
int suhu = A1;
int led_g=13;
int led_r=10;
void setup(){
pinMode(led_g, OUTPUT);
pinMode(led_r, OUTPUT);
pinMode(pinEcho, INPUT);
pinMode (pinTrigger, OUTPUT);
lcd.begin(16,2);
Serial.begin(9600);
lcd.clear();
lcd.print("Made by :");
lcd.setCursor (0,2);
lcd.print("12th group");
lcd.setCursor (0,0);
delay (100);
}
void loop(){
digitalWrite(pinTrigger,LOW);
delayMicroseconds(2);
digitalWrite(pinTrigger, HIGH);
delayMicroseconds(10);
digitalWrite(pinTrigger,LOW);
delayMicroseconds(10);
durasi = pulseIn(pinEcho, HIGH);
jarak = ((durasi*0.034)/2);
if(jarak<=500){
lcd.clear();
lcd.print("Silahkan Masuk:");
lcd.setCursor (0,2);
lcd.print("Door Open");
lcd.setCursor(0,1);
Serial.print("1");
delay(100);
digitalWrite (led_g,HIGH);
digitalWrite (led_r,LOW);
delay(500);
}
else{
lcd.clear();
lcd.print("Dilarang Masuk:");
lcd.setCursor(0,2);
lcd.print("Door Closed");
lcd.setCursor(0,1);
Serial.print("2");
delay(100);
digitalWrite (led_r,HIGH);
digitalWrite (led_g,LOW);
delay(500);
}
//saat memeriksa suhu
int rawvoltage= analogRead(suhu);
float millivolts= (rawvoltage/1024.0) * 5000;
float celsius= millivolts/10;
if (celsius>37){
Serial.print("3");
}
if (celsius<37){
Serial.print("4");
if(s1==HIGH && s2==LOW);{
Serial.print("6");
}
}
if(s1==LOW && s2==HIGH);{
Serial.print("7");}
}
----------------------------------------------------------
//SLAVE//slave#include <Servo.h>#include <LiquidCrystal.h>LiquidCrystal lcd(2,4,7,8,10,11);Servo servo1; //pintu masukServo servo2; //handsanitizerServo servo3; //pintu daruratServo servo4; //pintu keluarint pos1;int pos2;int pos3;int pos4;int led_g = 13;int led_r = 12;void setup(){pinMode(led_g, OUTPUT);pinMode(led_r, OUTPUT);lcd.begin(16,2);Serial.begin(9600);lcd.clear();lcd.print("Made by :");lcd.setCursor (0,2);lcd.print("12th group");lcd.setCursor (0,0);delay (100);servo1.attach(3);servo2.attach(5);servo3.attach(6);servo4.attach(9);}void loop(){if(Serial.available()>0){int data = Serial.read();if(data=='1')//ketika masuk ruangan{for (pos1=0; pos1 <180; pos1 +=1){servo1.write(pos1);delay(15);}//for (pos1=180; pos1 >0; pos1 -=1){// servo1.write(pos1);// delay(15);}}if(data=='2'){for (pos1=180; pos1 >0; pos1 -=1){servo1.write(pos1);delay(15);}// for (pos1=0; pos1 <180; pos1 +=1){// servo1.write(pos1);// delay(15);}}if(data=='3'){for (pos3=0; pos3 <180; pos3 +=1){servo3.write(pos3);delay(15);}for (pos3=180; pos3 >0; pos3 -=1){servo3.write(pos3);delay(15);}lcd.clear();lcd.print("Suhu Tak Normal");lcd.setCursor(0,2);digitalWrite (led_r,HIGH);digitalWrite (led_g,LOW);delay(500);}if(data=='4'){for (pos2=0; pos2 <180; pos2 +=1){servo2.write(pos2);delay(15);}for (pos2=180; pos2 >0; pos2 -=1){servo2.write(pos2);delay(15);}lcd.clear();lcd.print("Suhu Anda Normal");lcd.setCursor(0,2);digitalWrite (led_r,LOW);digitalWrite (led_g,HIGH);delay(500);}if (data=='6'){for (pos4=0; pos4 <180; pos4 +=1){servo4.write(pos4);delay(15);}}if (data=='7'){for (pos4=180; pos4 >0; pos4 -=1){servo4.write(pos4);delay(15);}}}}
- Pada kondisi normal
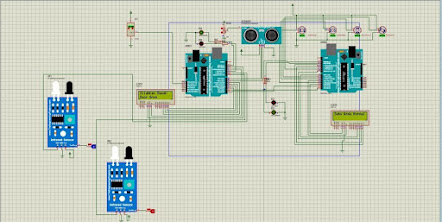 |
| Gambar 23. Rangkaian Simulasi Kondisi Normal |
{kind=link}
- Pada kondisi tak normal
 |
| Gambar 24. Rangkaian Simulasi Kondisi Tidak Normal |
{kind=link}
Berdasarkan rangkaian simulasi yang telah dikerjakan, dapat disimpulkan:
1. Rangcangan alat ukur suhu tubuh dan pemberi handsanitizier otomatis ini berada dalam suatu ruangan kecil yang bisa muat untuk satu orang yang bertujuan untuk mengecek suhu tubuh manusia.
2. Komponen yang digunakan pada rancangan alat ini adalah arduino sebagai mikrokontroller, motor servo sebagai penggerak pintu dan handsanitizer, sensor ultrasonic mendeteksi jarak orang atau benda, LED sebagai indikator, LM35 sebagai pengukur suhu tubuh, sensor infrared sebagai mendeteksi keberadaan orang.
3. Komunikasi yang digunakan pada rangkaian ini adalah komunikasi UART dimana TX arduino master akan dihubungkan ke RX arduino Slave, dan RX arduino master akan dihubungkan ke TX arduino Slave.
4. Pintu masuk akan terbuka ketika sensor ultrasonic mendeteksi keberadaan orang yang akan masuk ke dalam ruangan tersebut dan LED hijau akan menyala.
5. Ketika telah masuk dalam ruangan, maka akan ada sensor suhu yang akan mendeteksi suhu orang yang masuk didalam ruangan. Jika suhu yang di deteksi adalah normal atau dibawah 37 derjat maka, servo handsanitizer akan otomatis berputar dan akan keluar di pintu keluar ketika di deteksi oleh sensor infrared. Indikator yang akan diberikan oleh alat adalah adanya tampilan di LCD bahwa suhu tubuh normal dan LED hijau akan menyala. Akan tetapi jika suhu tubuh diatas 37 derjat maka, servo pintu keluar akan berputar menandakan orang tersebut harus keluar dari pintu darura tersebut, dengan indikator tampilan di LCD bahwa suhu tak normal dan LED merah akan menyala.
Tidak ada komentar:
Posting Komentar